




成果展示
文章发布时间:
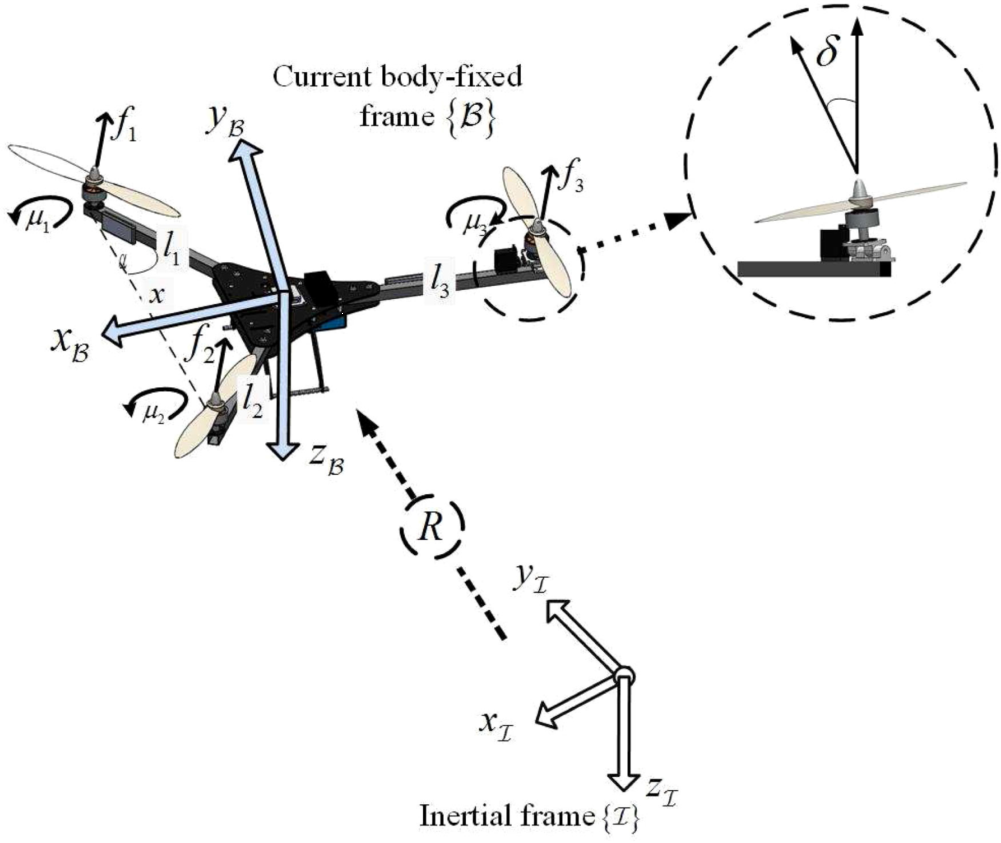
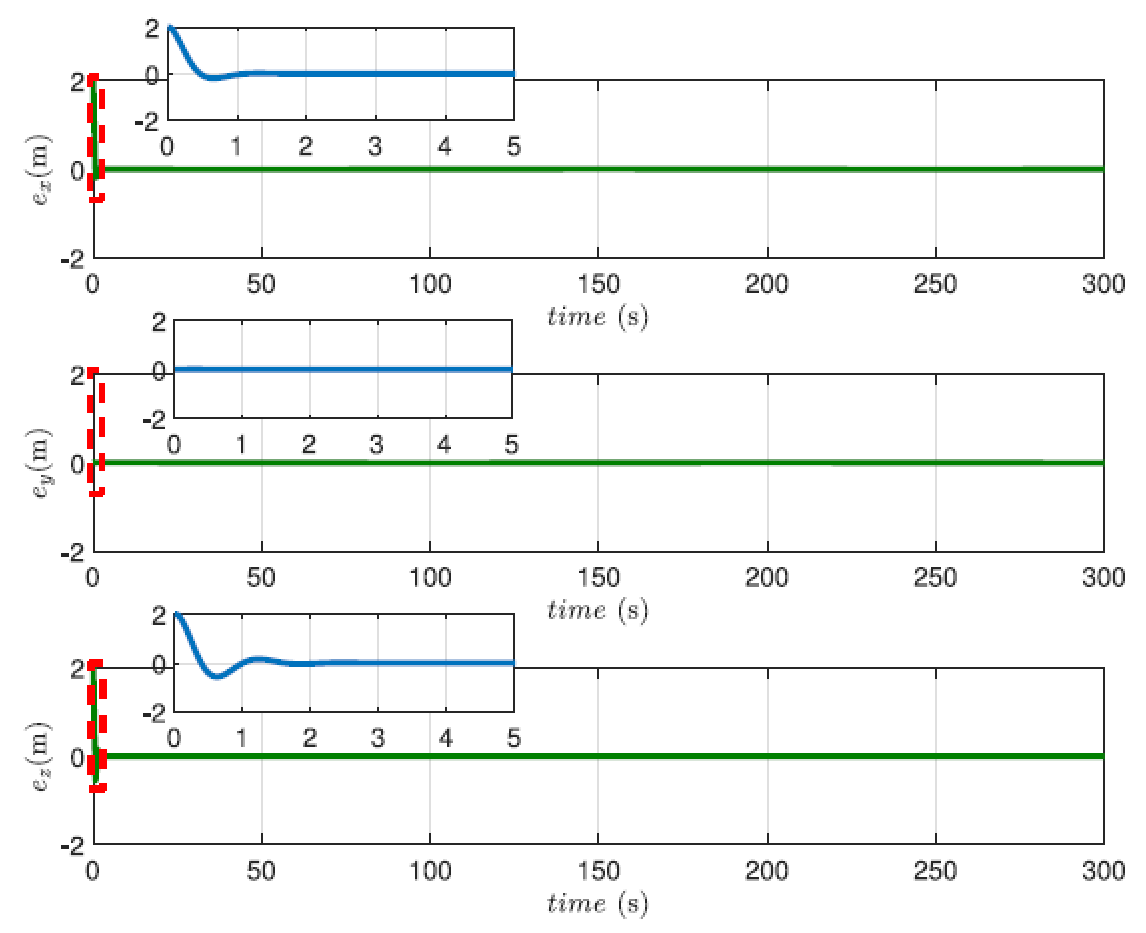
2025-03-07针对三旋翼无人机舵机发生堵塞故障时的位置和姿态控制,提出一种新的非线性鲁棒容错跟踪控制策略。考虑系统的欠驱动特性,将动力学模型分为高度子系统、外环平动位置子系统和内环姿态子系统。高度子系统和外环平动位置子系统采用浸入—不变集方法对模型参数不确定性进行补偿;内环姿态子系统首先采用自适应滑模观测器对舵机堵塞故障进行观测,然后基于鲁棒误差符号函数积分算法对故障观测误差和外部扰动进行补偿。采用Lyapunov理论对系统的稳定性进行了证明,并通过硬件在环仿真平台进行了实验验证。
研究得到了国家自然科学基金和山东省自然科学基金的联合资助。
论文发表于《IEEE Transactions on Industrial Electronics》,该期刊为美国电气和电子工程师学会旗下的学术期刊之一,专注于工业电子领域的研究和发展,是全球范围内电气工程领域中的顶级期刊之一,被认为是该领域的权威出版物。期刊影响因子为7.5,在学术界和工业界都具有广泛的影响力。论文第一作者为飞行学院郝伟博士。
版权所有 © 山东航空学院科研处 鲁ICP备07012503号-3 邮编:256603
地址:山东省滨州市黄河五路391号 电话:0543-3191160 邮箱:keyanchu319@163.com


科研处微信公众号