




成果展示
文章发布时间:
2025-03-10针对单输入-单输出(SISO)非线性严格反馈系统,本工作提出了结合动态面技术的优化反演控制方法。优化反步控制是设计反步控制的每个子系统的虚拟控制为最优控制,从而保证整个反步控制得到最优。但是优化反步控制需要反复计算虚拟控制的导数,因此不可避免地会造成“微分爆炸”的现象。本工作将优化反步控制与动态面技术相结合,有效缓解这种情况。此外,优化反步控制控制需要在每一个虚拟控制中执行强化学习,因此简化强化学习算法对于实现两者的结合是非常必要和实质性的。在本研究中,由于优化控制通过一个简单的正函数来求导Critic和Actor的训练律,不像传统的方法,利用Hamilton-Jacobi-Bellman (HJB)方程的平方求得,因此与传统的优化方法相比,它可以明显简化强化学习算法。最后,通过理论和仿真验证了该方法的可行性。
基于动态面技术的优化反步控制方法可以为非线性系统提供更精确、更稳定的控制方案,提高生产效率和产品质量。该方法的研究和应用不仅推动了非线性系统控制理论的发展,还为相关领域的科技进步提供了有力支持。通过不断的研究和探索,可以进一步完善和优化该方法,拓展其应用范围和提高其控制性能,为相关领域的科技进步和产业发展做出更大贡献。
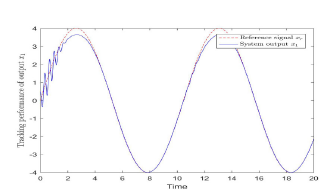
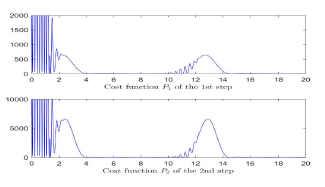
图1 仿真结果
论文发表于《IEEE Transactions on Systems, Man, and Cybernetics: Systems》,该期刊是系统工程、控制与计算机科学领域的顶尖刊物,具有较高的学术水平和影响力。该期刊的最新影响因子为8.6,2020-2021年影响因子最高达13.451分。期刊被划分为JCR1区,SCIE检索;在中科院分类中属于大类计算机科学1区、小类自动化与控制系统1区以及计算机:控制论1区。论文作者为理学院文国兴教授,发表时间为2024年7月。
版权所有 © 山东航空学院科研处 鲁ICP备07012503号-3 邮编:256603
地址:山东省滨州市黄河五路391号 电话:0543-3191160 邮箱:keyanchu319@163.com


科研处微信公众号